





产品介绍
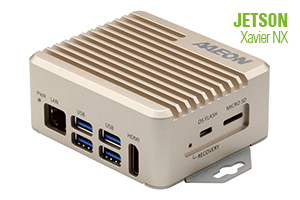
BOXER-8250AI嵌入式AI边缘系统搭载NVIDIA® Jetson Xavier™ NX,为智能应用和边缘网络提供动力。NVIDIA Jetson Xavier NX SoC具有六核64位ARM处理器,拥有384个CUDA®内核、48个Tensor内核以及两个能够并行运行多个神经网络的NVDLA引擎,可提供高达21 TOPS的加速计算性能。该系统旨在将专用的人工智能处理带入边缘领域,其还配备8GB LPDDR4内存和16GB板载eMMC内存,并且可通过Micro-SD卡插槽进行扩展。
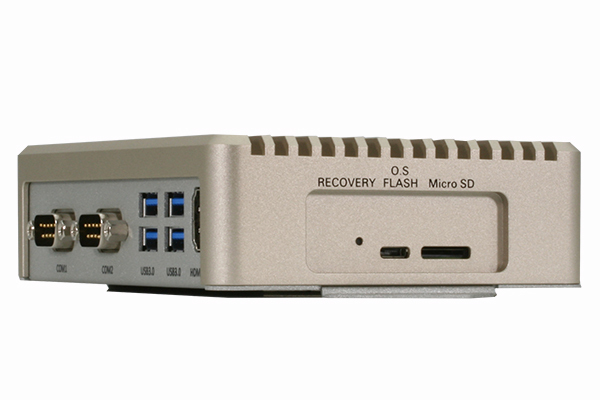
BOXER-8250AI具有灵活的I/O布局,有4个USB 3.2 Gen 1端口,5个千兆LAN端口和两个COM端口,允许部署与各种传感器或摄像头。BOXER-8250AI坚固耐用,可在多种环境中部署。无风扇设计,防尘,运行可靠;工作温度范围宽(-10°C ~ 65°C),无论在哪里部署,都能提供稳定的运行性能。
✦ 欲选购BOXER-8250AI,请点击研扬人工智能馆购买(顺丰48小时内出货)
✦ 欢迎加入研扬AI论坛
功能特点
- NVIDIA® Jetson Xavier™ NX
- 8GB LPDDR4
- Multi-storage option: 16GB eMMC / MicroSD slot / 2.5” drive bay
- GbE LAN x 5
- USB 3.2 Gen 1 x 4
- 10~24Vdc Power input
Recommend Products

技术规格 [BOXER-8250AI]
| system | |
| AI Accelerator | Nvidia Jetson Xavier NX |
| CPU | 6-core NVIDIA Carmel ARM® v8.2 64-bit CP |
| System Memory | 8GB LPDDR4x |
| Storage Device | 16 eMMC and MicroSD card slot (A1, A3) 16 eMMC and MicroSD card slot and 2.5” HDD drive(A4) |
| Display Interface | HDMI 2.0 |
| Ethernet | 10/100/1000Base-TX x 5 |
| I/O | USB Type A x 4 for USB 3.2 Gen 1 RJ-45 x 5 for GbE LAN DB-9 x 2 for RS-232 HDMI Type A x 1 for HDMI 2.0 MicroSD slot x 1 Micro USB x 1 for O.S Flash Recovery button x 1 Power button with power LED x 1 |
| Expansion | — |
| Indicator | Power LED x 1 |
| OS support | Linux (AAEON ACLinux 4.9) Linux (NVIDIA Jetpack 4.5) |
| power supply | |
| Power Requirement | 10 ~ 24V DC with 2-pin terminal block |
| mechanical | |
| Mounting | Wallmount |
| Dimension | A1, A3 : 6.92” x 3.94” x 1.54”(175.8mm x 100.0mm x 39.0mm) A4 : 6.92” x 3.94” x 2.41”(175.8mm x 100.0mm x 61.3mm) |
| Gross Weight | A1, A3 : 2.48 Ibs (1.12 kg) A4 : 3.5lbs (1.6kg) |
| Net Weight | A1, A3 : 1.46 Ibs (0.66 kg) A4 : 2.0lbs (0.91kg) |
| environmental | |
| Operating Temperature | A1, A3 : 14°F ~ 149°F (-10°C ~ 65°C, according to IEC60068-2 with 0.5 m/s AirFlow) A4 : -13°F ~ 140°F (-10°C ~ 60°C, according to IEC60068-2 with 0.5 m/s AirFlow) |
| Storage Temperature | -40°F ~ 176°F (-40°C ~ 80°C) |
| Storage Humidity | 95% @ 40°C, non-condensing |
| Anti-Vibration | 3.5Grm / 5~500Hz / operation (eMMC, MicroSD, or SSD) |
| Anti-Shock | — |
| Certification | CE/FCC class A |
订购信息 [BOXER-8250AI]
| Part Number | BOXER-8250AI-A1-1010 | BOXER-8250AI-A3-1010 | BOXER-8250AI-A4-1010 | BOXER-8250AI-JP46E-A1-1111 | BOXER-8250AI-JP46E-A2-1111 |
|---|---|---|---|---|---|
| ai solution | Jetson Xavier NX | Jetson Xavier NX | Jetson Xavier NX | Jetson Xavier NX | Jetson Xavier NX |
| lan | 5 | 5 | 5 | 5 | 5 |
| usb | USB 3.2 Gen 1 x 4 | USB 3.2 Gen 1 x 4 | USB 3.2 Gen 1 x 4 | USB 3.2 Gen 1 x 4 | USB 3.2 Gen 1 x 4 |
| rs-232 | 2 | 2 | 2 | 2 | 2 |
| storage | 16GB eMMC and Micro-SD card slot | 16GB eMMC and Micro-SD card slot | 16GB eMMC and Micro-SD card slot and 2.5" HDD Drive | 16GB eMMC and Micro-SD card slot | 16GB eMMC and Micro-SD card slot and 2.5" HDD Drive |
| display | HDMI x 1 | HDMI x 1 | HDMI x 1 | HDMI x 1 | HDMI x 1 |
| mounting | Wallmount | Wallmount | Wallmount | Wallmount | Wallmount |
| power | 10~24V | 10~24V | 10~24V | 10~24V | 10~24V |
| operation system | ACLinux 4.9 | NVIDIA Jetpack 4.5 | NVIDIA Jetpack 4.5 | NVIDIA Jetpack 4.6 | NVIDIA Jetpack 4.6 |
下载 [BOXER-8250AI]
- Datasheet
- Manual
包装内容
- Power Connector x 1
- BOXER-8250AI
选购配件
| 1255300611 | 60W Power Adapter |
| 1702031802 | Power Cord (US type) |
| 1702031803 | Power Cord (European Type) |
| 170203180E | Power Cord (Japanese Type) |
FAQ [BOXER-8250AI]
- Why can't install ROS?
- If you receive a customer asking how to install ROS2 (Melodic) on the BOXER-8120AI series, you can refer to the following method. When installing directly using ACLinux, you will encounter problems during the sudo apt update, mainly because ROS cannot recognize ACLinux. The lsb-release inside can be replaced by Ubuntu, and the attachments are related files and test results. Installation First, make sure your Debian package index is up-to-date: sudo apt update 1. Replace the original lsb-release in ACLinux with the attached lsb-release file, the file location is /etc 2. After restarting BOXER-AI series, use cat /etc/lsb-release to confirm whether to update to Ubuntu 18.04.2 3. Please refer to the following Wiki URL to install ROS Melodic http://wiki.ros.org/melodic/Installation/Ubuntu For more information, please contact AAEON AE.
 苏公网安备 32059002002996号
苏公网安备 32059002002996号