



Overview
The BOXER-8251AI is powered by the innovative Jetson Xavier NX from NVIDIA. Featuring a six-core 64-bit ARM processor, it boasts 384 CUDA® cores, 48 Tensor Cores, and two NVDIA engines capable of running multiple neural networks in parallel, delivering accelerated computing performance up to 21 TOPS. Built to bring dedicated AI processing to the edge, the system also features 8GB of LPDDR4 memory and 16GB of onboard eMMC memory that’s expandable through the Micro-SD card slot.
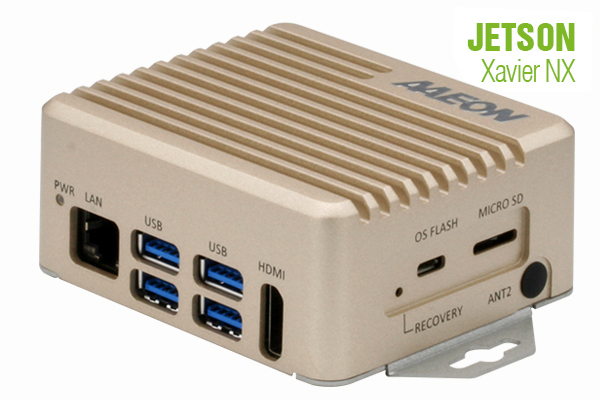
One of the most innovative features of the NVIDIA Jetson Xavier NX is the ability of users to select five different performance modes. These modes allow users to tailor the number of cores, processor speed, and power draw the system utilizes. The BOXER-8251AI also provides users with greater flexibility with its compact size and I/O features; with two COM ports and four USB 3.2 Gen 1 ports, as well as Gigabit Ethernet port. Its rugged, fanless design keeps dust and other contaminants out of the system, offering reliable and low-maintenance operation for more stable performance.
✦ Shop Online (Orders dispatched in 3 working days)
✦ Join Our AI Community
Features
- NVIDIA® Jetson Xavier™ NX
- 8GB LPDDR4x + 16GB eMMC
- USB3.2 Gen 1 x 4
- LAN x 1 + RS-232 x 2
- 12Vdc Power input


Specifications [BOXER-8251AI]
| system | |
| AI Accelerator | Nvidia Jetson Xavier NX |
| CPU | 6 Core ARM® Carmel®V8.2 64bit CPU 6MB L2 + 4MB L3 |
| System Memory | 8GB LPDDR4x |
| Storage Device | 16GB eMMC + MicroSD |
| Display Interface | HDMI 2.0 |
| Ethernet | 10/100/1000Base-TX x 1 |
| I/O | USB 3.2 Gen 1 x 4 LAN x 1 RS-232 x 2 HDMI x 1 MicroSD x 1 DC Power Input x 1 Recovery Button x 1 Micro-USB for Flash OS x 1 |
| Expansion | M.2 E-Key 2230 x 1(for WiFi) |
| Indicator | Power LED x 1 |
| OS support | Linux (AAEON ACLinux 4.9) Linux (NVIDIA Jetpack 4.5) Ubuntu18.04 |
| power supply | |
| Power Requirement | 12Vdc w/ 2-pin terminal block |
| mechanical | |
| Mounting | Wallmount |
| Dimension | Standard: 3.46” x 2.95” x 1.53” (88mm x 75mm x 39mm) High heatsink Dimension: 3.54” x 3.30” x 2.04”(90mm x 84mm x 52mm) |
| Gross Weight | Standard: 1.10 lb (0.5 kg) High heatsink: 1.76lb(0.8kg) |
| Net Weight | Standard: 0.66 lb (0.3 kg) High heatsink: 1.3lb(0.6kg) |
| environmental | |
| Operating Temperature | (Please refer to below) |
| Storage Temperature | -40°F ~ 158°F (-40°C ~ 70°C) |
| Storage Humidity | 95% @ 40°C, non-condensing |
| Anti-Vibration | 3 Grms/ 5 ~ 500Hz/ operation – MicroSD or eMMC |
| Anti-Shock | — |
| Certification | CE/FCC class A |
Ordering Information [BOXER-8251AI]
| Part Number | BOXER-8251AI-A3-1010 | BOXER-8251AI-JP46E-A1-1010 | BOXER-8251AI-JP46E-E1-1010 (HIGH HEATSINK) |
|---|---|---|---|
| ai solution | Jetson Xavier NX | Jetson Xavier NX | Jetson Xavier NX |
| lan | 1 | 1 | 1 |
| usb | 3.2 Gen 1 x 4 | 3.2 Gen 1 x 4 | 3.2 Gen 1 x 4 |
| rs-232 | 2 | 2 | 2 |
| storage | 16GB eMMC + MicroSD | 16GB eMMC + MicroSD | 16GB eMMC + MicroSD |
| display | HDMI x 1 | HDMI x 1 | HDMI x 1 |
| mounting | Wallmount | Wallmount | Wallmount |
| power | 12Vdc w/ 2 pin terminal block | 12Vdc w/ 2 pin terminal block | 12Vdc w/ 2 pin terminal block |
| operation system | NVIDIA Jetpack 4.5 | NVIDIA Jetpack 4.6 | NVIDIA Jetpack 4.6 |
Downloads [BOXER-8251AI]
- Datasheet
- Manual
Packing List
- Power Connector x 1
- BOXER-8251AI
Optional Accessories
| 1255300611 | 60W Power Adapter |
| 1702031802 | Power Cord (US type) |
| 1702031803 | Power Cord (European Type) |
| 170203180E | Power Cord (Japanese Type) |
Operating Temperature
| Power mode | CPU Core | CPU Maximum Frequency | Operation Temp. |
| 20W | 6 Core | 1.4GHz | -20°C ~ 55°C (for high heat sink) |
| 15W | 6 Core | 1.4GHz | -20°C ~ 40°C/-20°C ~ 50°C(for high heat sink) |
| 15W | 4 Core | 1.4GHz | -20°C~40°C |
| 15W | 2 Core | 1.9GHz | -20°C ~ 50°C/-20°C ~ 60°C(for high heat sink) |
| 10W | 4 Core | 1.2GHz | -20°C ~ 50°C/-20°C ~ 60°C(for high heat sink) |
| 10W | 2 Core | 1.5GHz | -20°C~50°C |
FAQ [BOXER-8251AI]
- Why can't install ROS?
- If you receive a customer asking how to install ROS2 (Melodic) on the BOXER-8120AI series, you can refer to the following method. When installing directly using ACLinux, you will encounter problems during the sudo apt update, mainly because ROS cannot recognize ACLinux. The lsb-release inside can be replaced by Ubuntu, and the attachments are related files and test results. Installation First, make sure your Debian package index is up-to-date: sudo apt update 1. Replace the original lsb-release in ACLinux with the attached lsb-release file, the file location is /etc 2. After restarting BOXER-AI series, use cat /etc/lsb-release to confirm whether to update to Ubuntu 18.04.2 3. Please refer to the following Wiki URL to install ROS Melodic http://wiki.ros.org/melodic/Installation/Ubuntu For more information, please contact AAEON AE.