




- Маералы
- Возможнос прмененя
- GENE-ARH6 Humanoid Robotics Application
Executive Summary
Humanoid robotics is entering a new era, with warehouse logistics, manufacturing automation, and even commercial service sectors seeing the potential that such technologies can offer. This shift can be partially attributed to the enormous advancements made in bringing multimodal AI inference capabilities to the edge, but this alone does not tell the whole story.
While new GPU architectures have undoubtedly contributed to the sophistication with which humanoid robots are able to interpret complex environments and make decisions based on them, questions have remained on how best to bridge the gap between decision-making and precise, synchronized real-world operability.
To address this, a leading research enterprise came up with a plan to implement a distributed computing architecture that could make their new intelligent service robot a practical solution for real world use. To do so, they adopted AAEON’s GENE-ARH6, a 3.5" SubCompact Board powered by the Intel Core Ultra Series 2 Processor platform, as the component capable of translating high-level AI decision-making into synchronized physical actions.
System-Level Challenges in Humanoid Robotics
For a humanoid robot to succeed in a live deployment environment, it needs to be able to perform two different tasks. The first of these is to ingest and analyze video and sensor data to make high-level decisions. The second is to take the commands that arise from these decisions and physically execute them. It is when trying to bring these two processes in line with one another that conflicts arise.
For example, when running multiple inferencing models on the data required for a robot to understand and make decisions, resources can be stretched too thin to adequately manage control timing. On the other hand, when control loops are prioritized, the system’s GPU may face latency in its analysis. Either instance upsets the delicate balance required to run multiple simultaneous processes that rely on precision above all else.
Bridging the Brain-Body Barrier
Having spent a number of years researching and developing an ecosystem capable of addressing the challenges outlined, AAEON’s customer designed a dual-layer architecture.
- An embedded system powered by the NVIDIA Jetson AGX Orin module to act as the robot’s “brain”, responsible for high-level decision-making.
- AAEON’s GENE-ARH6, powered by the Intel Core Ultra 7 Processor 255H with an integrated Intel Arc 140T GPU and Intel AI Boost NPU, to serve as the controller for the robot’s “nervous system”.
This distributed computing architecture provides a number of crucial advantages over single-system setups. For one, it means the company’s humanoid robot model can leverage the wealth of unified robot learning frameworks supported by the NVIDIA Jetson AGX Orin platform for high-level decision-making. Meanwhile, the GENE-ARH6 is well-suited to receive the resulting commands, consolidating multiple sensing modalities into a unified control layer through which to execute coordinated, precise movement tasks.
The Role of GENE ARH6 in the Command > Execution Pipeline

For the company’s humanoid robot, the GENE-ARH6 represented a real-time operational backbone capable of actioning deterministic behavior and maintaining system stability. To do this, the customer not only utilized the high single and multi-thread compute performance of the GENE-ARH6's Intel Core Ultra 7 Processor 255H, but also a number of its industrial-grade I/Os.
Application Architecture
Next-Gen Intel Core Ultra Series 2 Processing
At the heart of the GENE-ARH6's suitability as the humanoid robot’s “nervous system” was its embedded Intel Core Ultra 7 255H processor, which granted two distinct benefits.
The first of these was its disaggregated architecture, which allowed the GENE-ARH6's Intel Core Ultra 7 255H processor to assign time-sensitive tasks to dedicated performance-cores to minimize jitter and maintain predictable execution. Conversely, less urgent processes could be handled by the platform’s low power efficient-cores to increase power-efficiency.
The second benefit was the Intel Core Ultra 7 255H processor platform’s ability to locally execute lightweight, latency-sensitive AI tasks that would otherwise need to be relayed back to the NVIDIA Jetson AGX Orin.
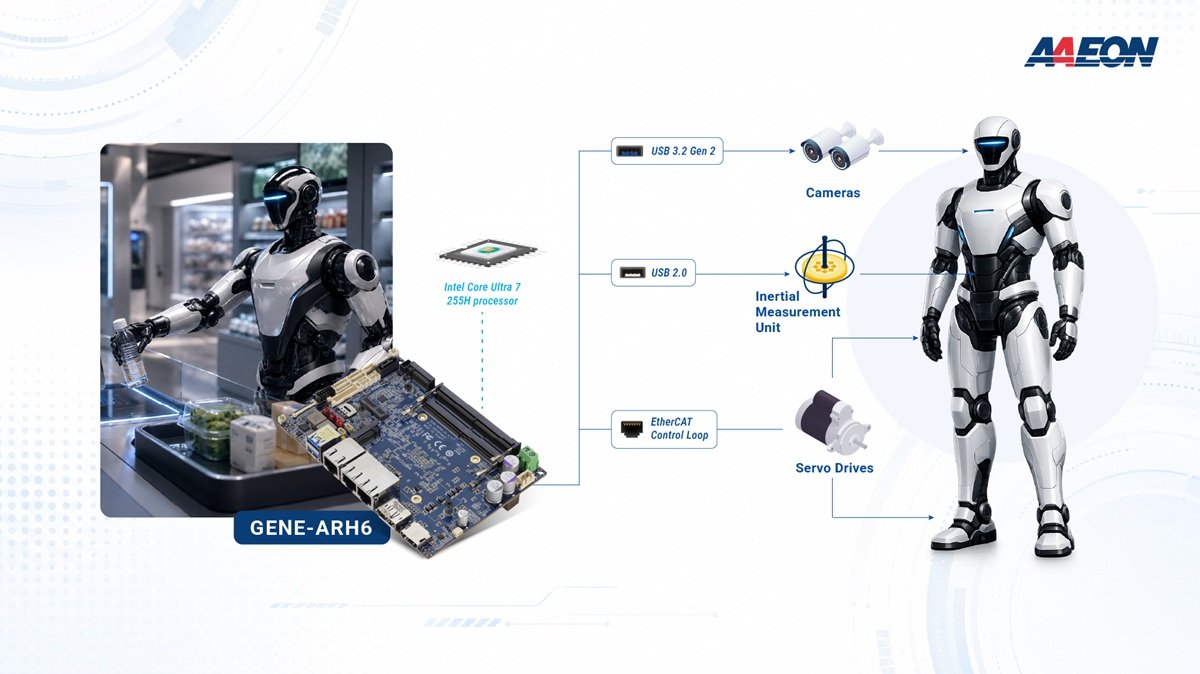
Real-Time Sensor Integration
Similar to the synchronized communication provided by the GENE-ARH6's LAN interface, the board’s range of USB ports meant it consolidated multiple sensing modalities into a unified control layer.
This began with its internal USB 2.0 connectors, which were used to connect with the robot’s Inertial Measurement Unit (IMU). This interface allowed the GENE-ARH6 to obtain key orientation and motion sensor data to inform control instructions to maintain balance and stability.
Meanwhile, the GENE-ARH6's USB 3.2 Gen 2 ports were provided a direct route through which to ingest video streams from multiple connected cameras, reducing the time taken to allow for pre-processing. By handling sensor input at the control layer, the system GENE-ARH6 could provide faster feedback loops, improve the stability of the robot’s movements, and reduce latency between movement commands being issued to and executed by the robot’s limbs.

Deterministic Motion Execution via EtherCAT
An essential function of the GENE-ARH6 was to act as an EtherCAT master, connected to each of the robot’s joint actuators through its LAN ports. Equipped with both Intel Ethernet Controller I226 NICs and strong driver support for an EtherCAT master stack due to the application’s Linux environment, the board made synchronized communication with servo drives across the robot’s limbs possible via a high-speed EtherCAT control loop.
Communication Gateway Provision
The GENE-ARH6's role in the customer’s robot ecosystem extended far beyond executing control commands, with its broad expansion capabilities granting wireless networking to allow for remote monitoring and cloud analytics.
To do so, the customer populated the board’s M.2 2230 E-Key and M.2 3052 B-Key with Wi-Fi and 5G modules, respectively. While not as critical to the robot’s operation as its CPU platform or I/O configuration, this connectivity does offer practical benefits, such as the ability to coordinate multiple units as part of a fleet.
Designed for Mobile and Embedded Deployment
Designed for reliability in demanding industrial environments, the GENE-ARH6 provided an incredibly stable and durable option for use in such a complex application. At just 146mm x 101.7mm, the board could be installed as part of the robot’s interior without being intrusive. In addition to this, a 9V to 36V power input tolerance made it optimal for maintaining stable operation throughout fluctuations in power supply, critical for battery powered setups such as the customer’s robot.
Looking to the Future
As the use of humanoid robots in real-world applications becomes increasingly feasible, it has become apparent that execution matters just as much as decision-making. While powerful GPU platforms have made it possible for robots to better understand the environment around them and decide on the best course of action, it is the ability to consistently translate those decisions into action that ultimately determines their practicality.
By adopting a distributed computing architecture with the GENE-ARH6 as the “nervous system” of their humanoid robot, AAEON’s customer showed that bridging the gap between understanding and action is possible. With the NVIDIA Jetson AGX Orin handling high-level perception and decision-making, and the GENE-ARH6 managing deterministic control, this project showcased a clear separation of responsibilities. Consequently, each component could do its job in the most optimal way, while still maintaining coordination between them.
As a result, the customer was able to develop a humanoid robotics platform that not only demonstrates advanced intelligence, but is also capable of putting this intelligence into practice for practical deployment. The customer has earmarked a number of areas that they feel their platform can make a measurable impact, including research, commercial, industrial, and training environments.




