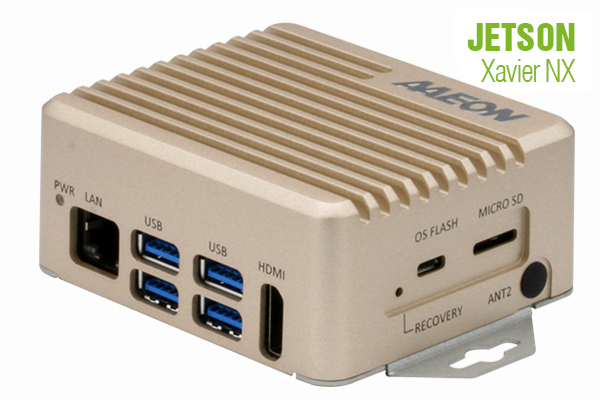




產品介紹
BOXER-8251AI搭載英偉達的創新產品Jetson Xavier NX。它採用6核64位ARM處理器,擁有384個CUDA®核心、48個Tensor核心,以及兩個能夠並行運行多個神經網絡的NVDIA引擎,提供高達21 TOPS的加速計算性能。該系統還配備了8GB的LPDDR4內存和16GB的板載eMMC內存,並可通過Micro-SD卡插槽進行擴展。
NVIDIA Jetson Xavier NX最具創新的功能之一是用戶可以選擇五種不同的性能模式。這些模式允許用戶定制系統使用的內核數量、處理器速度和功耗。 BOXER-8251AI還為用戶提供了更大的靈活性,其緊湊的尺寸和I/O功能;有兩個COM端口和四個USB 3.2 Gen 1端口,以及千兆以太網端口。其堅固耐用的無風扇設計可防止灰塵和其他污染物進入系統,提供可靠和低維護操作,以獲得更穩定的性能。
✦ 線上選購(最快3工作天內快速出貨)
✦ 歡迎加入研揚AI論壇
功能特性
- NVIDIA® Jetson Xavier™ NX
- 8GB LPDDR4x + 16GB eMMC
- USB3.2 Gen 1 x 4
- LAN x 1 + RS-232 x 2
- 12Vdc Power input
Recommend Products


產品規格 [BOXER-8251AI]
| system | |
| AI Accelerator | Nvidia Jetson Xavier NX |
| CPU | 6 Core ARM® Carmel®V8.2 64bit CPU 6MB L2 + 4MB L3 |
| System Memory | 8GB LPDDR4x |
| Storage Device | 16GB eMMC + MicroSD |
| Display Interface | HDMI 2.0 |
| Ethernet | 10/100/1000Base-TX x 1 |
| I/O | USB 3.2 Gen 1 x 4 LAN x 1 RS-232 x 2 HDMI x 1 MicroSD x 1 DC Power Input x 1 Recovery Button x 1 Micro-USB for Flash OS x 1 |
| Expansion | M.2 E-Key 2230 x 1(for WiFi) |
| Indicator | Power LED x 1 |
| OS support | Linux (AAEON ACLinux 4.9) Linux (NVIDIA Jetpack 4.5) Ubuntu18.04 |
| power supply | |
| Power Requirement | 12Vdc w/ 2-pin terminal block |
| mechanical | |
| Mounting | Wallmount |
| Dimension | Standard: 3.46” x 2.95” x 1.53” (88mm x 75mm x 39mm) High heatsink Dimension: 3.54” x 3.30” x 2.04”(90mm x 84mm x 52mm) |
| Gross Weight | Standard: 1.10 lb (0.5 kg) High heatsink: 1.76lb(0.8kg) |
| Net Weight | Standard: 0.66 lb (0.3 kg) High heatsink: 1.3lb(0.6kg) |
| environmental | |
| Operating Temperature | (Please refer to below) |
| Storage Temperature | -40°F ~ 158°F (-40°C ~ 70°C) |
| Storage Humidity | 95% @ 40°C, non-condensing |
| Anti-Vibration | 3 Grms/ 5 ~ 500Hz/ operation – MicroSD or eMMC |
| Anti-Shock | — |
| Certification | CE/FCC class A |
訂購資訊 [BOXER-8251AI]
| Part Number | BOXER-8251AI-A3-1010 | BOXER-8251AI-JP46E-A1-1010 | BOXER-8251AI-JP46E-E1-1010 (HIGH HEATSINK) |
|---|---|---|---|
| ai solution | Jetson Xavier NX | Jetson Xavier NX | Jetson Xavier NX |
| lan | 1 | 1 | 1 |
| usb | 3.2 Gen 1 x 4 | 3.2 Gen 1 x 4 | 3.2 Gen 1 x 4 |
| rs-232 | 2 | 2 | 2 |
| storage | 16GB eMMC + MicroSD | 16GB eMMC + MicroSD | 16GB eMMC + MicroSD |
| display | HDMI x 1 | HDMI x 1 | HDMI x 1 |
| mounting | Wallmount | Wallmount | Wallmount |
| power | 12Vdc w/ 2 pin terminal block | 12Vdc w/ 2 pin terminal block | 12Vdc w/ 2 pin terminal block |
| operation system | NVIDIA Jetpack 4.5 | NVIDIA Jetpack 4.6 | NVIDIA Jetpack 4.6 |
下載 [BOXER-8251AI]
- Datasheet
- Manual
包裝內容
- Power Connector x 1
- BOXER-8251AI
選購配件
| 1255300611 | 60W Power Adapter |
| 1702031802 | Power Cord (US type) |
| 1702031803 | Power Cord (European Type) |
| 170203180E | Power Cord (Japanese Type) |
Operating Temperature
| Power mode | CPU Core | CPU Maximum Frequency | Operation Temp. |
| 20W | 6 Core | 1.4GHz | -20°C ~ 55°C (for high heat sink) |
| 15W | 6 Core | 1.4GHz | -20°C ~ 40°C/-20°C ~ 50°C(for high heat sink) |
| 15W | 4 Core | 1.4GHz | -20°C~40°C |
| 15W | 2 Core | 1.9GHz | -20°C ~ 50°C/-20°C ~ 60°C(for high heat sink) |
| 10W | 4 Core | 1.2GHz | -20°C ~ 50°C/-20°C ~ 60°C(for high heat sink) |
| 10W | 2 Core | 1.5GHz | -20°C~50°C |
常見問題 [BOXER-8251AI]
- Why can't install ROS?
- If you receive a customer asking how to install ROS2 (Melodic) on the BOXER-8120AI series, you can refer to the following method. When installing directly using ACLinux, you will encounter problems during the sudo apt update, mainly because ROS cannot recognize ACLinux. The lsb-release inside can be replaced by Ubuntu, and the attachments are related files and test results. Installation First, make sure your Debian package index is up-to-date: sudo apt update 1. Replace the original lsb-release in ACLinux with the attached lsb-release file, the file location is /etc 2. After restarting BOXER-AI series, use cat /etc/lsb-release to confirm whether to update to Ubuntu 18.04.2 3. Please refer to the following Wiki URL to install ROS Melodic http://wiki.ros.org/melodic/Installation/Ubuntu For more information, please contact AAEON AE.